|
Publications
2015

Linder, T., Arras K.O.,
People Detection, Tracking and Visualization using ROS on a Mobile Service Robot
Robot Operating System (ROS): The Complete Reference. Springer Studies in Systems, Design and Control, 2015.
pdf (to be published) | bib |
|

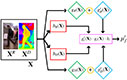
Linder, T., Arras K.O.,
Real-Time Full-Body Human Attribute Classification in RGB-D Using a Tessellation Boosting Approach
IEEE/RSJ Int. Conference on Intelligent Robots and Systems (IROS'15), Hamburg, Germany, 2015.
pdf (to be published) | bib | data | code
|
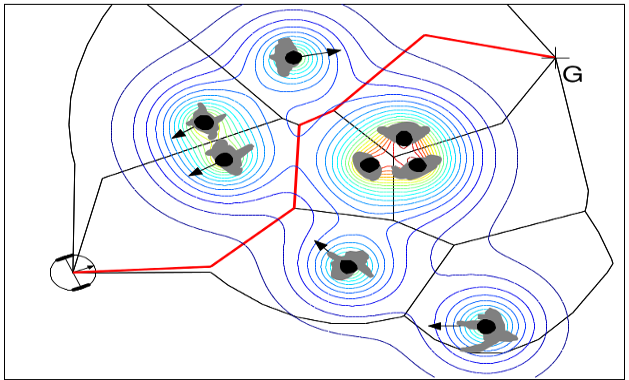
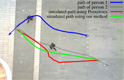
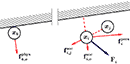
Palmieri, L., Rudenko, A., Arras K.O.,
A Fast Randomized Method to Find Homotopy Classes for Socially-Aware Navigation
Assistance and Service Robotics Workshop (ASROB-15) at the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS) 2015
| |
|

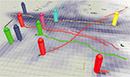
Linder, T., Girrbach, F., Arras K.O.,
Towards a Robust People Tracking Framework for Service Robots in Crowded, Dynamic Environments
Assistance and Service Robotics Workshop (ASROB-15) at the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS) 2015
| |
|

Okal, B., Gilbert, H., Arras K.O.,
Efficient Inverse Reinforcement Learning using Adaptive State Graphs
Proc. of Learning from Demonstration: Inverse Optimal Control, Reinforcement Learning and Lifelong Learning Workshop at Robotics: Science and Systems (RSS), Rome, Italy, 2015.
|
|

Triebel, R., Arras, K.O., Alami, R., Beyer, L., Breuers, S., Chatila, R., Chetouani, M., Cremers, D., Evers, V., Fiore, M., Hung, H., Islas Ramirez, O., Joosse, M., Khambhaita, H., Kucner, T., Leibe, B., Lilienthal, A., Linder, T., Lohse, M., Magnusson, M., Okal, B., Palmieri, L., Rafi, U., van Rooij, M., Zhang, L.
SPENCER: A Socially Aware Service Robot for Passenger Guidance and Help in Busy Airports
Conference on Field and Service Robotics (FSR), Toronto, Canada, 2015.
|
|

Palmieri L., Arras K.O.,
Distance Metric Learning for RRT-Based Motion Planning with Constant-Time Inference
IEEE International Conference on Robotics and Automation (ICRA'15), Seattle, USA, 2015.
|
|
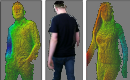
Linder, T., Wehner, S., Arras K.O.,
Real-Time Full-Body Human Gender Recognition in (RGB)-D Data
IEEE International Conference on Robotics and Automation (ICRA'15), Seattle, USA, 2015.
| | |
|
2014

Schwenk M., Vaquero T., Nejat G., Arras K.O.
Schedule-Based Robotic Search for Multiple Residents in a Retirement Home Environment
AAAI Conference on Artificial Intelligence (AAAI'14), Quebec, Canada, 2014.
pdf |
|

Palmieri L., Arras K. O.
A Novel RRT Extend Function for Efficient and Smooth Mobile Robot Motion Planning
IEEE/RSJ Int. Conference on Intelligent Robots and Systems (IROS'14), Chicago, USA, 2014.
pdf |
|

Vasquez D., Okal B., Arras K. O.
Inverse Reinforcement Learning Algorithms and Features for Robot Navigation in Crowds: an Experimental Comparison
IEEE/RSJ Int. Conference on Intelligent Robots and Systems (IROS'14), Chicago, USA, 2014.
pdf |
|

Linder T., Arras K.O.
Multi-Model Hypothesis Tracking of Groups of People in RGB-D Data
IEEE Int. Conference on Information Fusion (FUSION'14), Salamanca, Spain, 2014.
|
|

Becker-Asano C., Arras K.O., Nebel B.
Robotic Tele-Presence with DARYL in the Wild
Int. Conf. on Human-Agent Interaction (HAI'14), Tsukuba, Japan, 2014.
pdf |
|
Schwenk M., Arras K.O.
R2-D2 Reloaded: A Flexible Sound Synthesis System for Sonic Human-Robot Interaction Design
IEEE Int. Symposium on Robot and Human Interactive Communication (RO-MAN'14), Edinburgh, UK, 2014.
pdf |
|
Okal B., Arras K.O.
Towards Group-Level Social Activity Recognition for Mobile Robots
IROS 2014 Workshop on Assistance and Service Robotics in a Human Environment, Chicago, USA, 2014.
pdf |
|
|
Palmieri L., Arras K.O.
Distance Metric Learning for RRT-Based Motion Planning for Wheeled Mobile Robots
IROS 2014 Workshop on Machine Learning in Planning and Control of Robot Motion, Chicago, USA, 2014.
pdf |
|

Tipaldi G.D., Braun M., Arras K.O.
FLIRT: Interest Regions for 2D Range Data with Applications to Robot Navigation
Experimental Robotics, Springer Tracts in Advanced Robotics, vol. 79, 2014.
pdf |
|

Schwenk M., Vaquero T., Nejat G., Arras K.O.
Planning a Robot's Search for Multiple Residents in a Retirement Home Environment
ICAPS 2014 Workshop on Planning and Robotics (PlanRob'14), Portsmouth, USA, 2014.
|
|

Palmieri L., Arras K. O.
Efficient and Smooth RRT Motion Planning Using a Novel Extend Function for Wheeled Mobile Robots
ICAPS 2014 Workshop on Planning and Robotics (PlanRob'14), Portsmouth, USA, 2014.
pdf |
|

Becker-Asano C., Gustorff S., Arras K.O., Nebel B.
On the Effect of Operator Modality on Social and Spatial Presence during Teleoperation of a Human-Like Robot
Int. Symposium on New Frontiers in Human-Robot Interaction at AISB'14, London, UK, 2014.
pdf |
|
2013

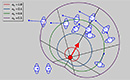
Luber M., Arras K.O.
Multi-Hypothesis Social Grouping and Tracking for Mobile Robots
Robotics: Science and Systems (RSS), Berlin, Germany, 2013
Best Student Paper Award Finalist
pdf |
|

Becker-Asano C., Gustorff S., Arras K.O., Ogawa K., Nishio S., Ishiguro H., Nebel B.
Robot embodiment, operator modality, and social interaction in tele-existence: a project outline
ACM/IEEE international conference on Human-robot interaction (HRI'13), Tokyo, Japan, 2013.
pdf |
|
2012

Becker-Asano C., Arras K.O., Nebel B., Ishiguro H.,
The Effect of Anthropomorphism on Social Tele-Embodiment
IROS 2012 Workshop on
Human-Agent Interaction, Vilamoura, Portugal, 2012
|
|

Embgen S., Luber M., Becker-Asano C., Ragni M., Evers V., Arras K.O.,
Robot-Specific Social Cues in Emotional Body Language
IEEE Int. Symposium on Robot and Human Interactive Communication (RO-MAN'12), Paris, France, 2012
|
|

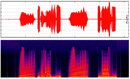
Stork J.A., Spinello L., Silva J., Arras K.O.,
Audio-Based Human Activity Recognition Using Non-Markovian Ensemble Voting
IEEE Int. Symposium on Robot and Human Interactive Communication (RO-MAN'12), Paris, France, 2012
|
|
Luber M., Spinello L., Silva J., Arras K.O.,
Socially Acceptable Robot Navigation: A Learning Approach
IEEE/RSJ Int. Conference on Intelligent Robots and Systems (IROS'12), Vilamoura, Portugal, 2012
pdf |
|

Arras K.O., Lau B., Grzonka S., Luber M., Mozos O., Meyer-Delius D., Burgard W.
Range-Based People Detection and Tracking for Socially Enabled Service Robots
In: Towards Service Robots for Everyday Environments, Springer STAR series, vol. 76, p. 235-280, 2012
pdf |
|
Spinello L., Arras K.O.,
Leveraging RGB-D Data: Adaptive Fusion and Domain Adaptation for Object Detection
IEEE International Conference on Robotics and Automation (ICRA'12), St. Paul, USA, 2012
|
|
2011

Stork J.A., Silva J., Spinello L., Arras K.O.,
Audio-Based Human Activity Recognition with Robots
Int. Conference on Social Robotics (ICSR'11), Work-In-Progress Track, Amsterdam, The Netherlands, 2011
|
|

Spinello L., Arras K.O.,
People detection in RGB-D data
IEEE/RSJ Int. Conference on Intelligent Robots and Systems (IROS'11), San Francisco, USA, 2011
| | data sets
|

Luber M., Spinello L., Arras K.O.,
People Tracking in RGB-D Data With On-line Boosted Target Models
IEEE/RSJ Int. Conference on Intelligent Robots and Systems (IROS'11), San Francisco, USA, 2011
| | data sets
|

Tipaldi G.D., Arras K.O.,
Please do not disturb! Minimum Interference Coverage for Social Robots
IEEE/RSJ Int. Conference on Intelligent Robots and Systems (IROS'11), San Francisco, USA, 2011
|
|

Luber M., Spinello L., Arras K.O.,
Learning to Detect and Track People in RGB-D Data
RSS'11 Workshop on RGB-D: Advanced Reasoning with Depth Cameras, Los Angeles, USA, 2011
| | data sets
|
Luber M., Tipaldi G.D., Arras K.O.,
Place-Dependent People Tracking
International Journal of Robotics Research (IJRR), vol. 30, no. 3, March 2011
| |
|

Tipaldi G.D., Arras K.O.,
Planning Problems for Social Robots
International Conference on Automated Planning and Scheduling (ICAPS'11), Freiburg, Germany, 2011
|
|

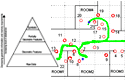
Tipaldi G.D., Arras K.O.,
I Want my Coffee Hot! Learning to Find People Under Spatio-Temporal Constraints
IEEE International Conference on Robotics and Automation (ICRA'11), Shanghai, China, 2011
|
|

Spinello L., Luber M., Arras K.O.,
Tracking People in 3D Using a Bottom-Up Top-Down Detector
IEEE International Conference on Robotics and Automation (ICRA'11), Shanghai, China, 2011
| | data sets
|

Luber M., Tipaldi G.D., Arras K.O.,
Better Models For People Tracking
IEEE International Conference on Robotics and Automation (ICRA'11), Shanghai, China, 2011
| |
|
2010
|
Tipaldi G.D., Braun M., Arras K.O.,
FLIRT: Interest Regions for 2D Range Data with Applications to Robot Navigation
12th Int. Symposium on Experimental Robotics (ISER'10), New Delhi, India, 2010
| |
|

Spinello L., Triebel R., Vasquez D., Arras K.O., Siegwart R.,
Exploiting Repetitive Object Patterns for Model Compression and Completion
European Conference on Computer Vision (ECCV'10), Heraklion, Greece, 2010
| |
|

Spinello L., Arras K.O., Triebel R., Siegwart R.,
A Layered Approach to People Detection in 3D Range Data
AAAI Conference on Artificial Intelligence (AAAI'10), Atlanta, USA, 2010
| | data sets |
|
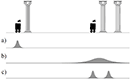
Luber M., Stork J.A., Tipaldi G.D., Arras K.O.,
People Tracking with Human Motion Predictions from Social Forces
IEEE International Conference on Robotics and Automation (ICRA'10), Anchorage, USA, 2010
|
|
Tipaldi G.D., Arras K.O.,
FLIRT - Interest Regions for 2D Range Data
IEEE International Conference on Robotics and Automation (ICRA'10), Anchorage, USA, 2010
| |
|
Van de Ven J., Ramos F., Tipaldi G.D.,
An Integrated Probabilistic Model for Scan Matching, Moving Object Detection and Motion Estimation
IEEE International Conference on Robotics and Automation (ICRA'10), Anchorage, USA, 2010
|
|

Lau B., Arras K.O., Burgard W.,
Multi-Model Hypothesis Group Tracking and Group Size Estimation
International Journal of Social Robotics, vol. 2, nr. 1, March 2010
| |
|
Mü,ller J., Stachniss C., Arras K.O., Burgard W.,
Socially Inspired Motion Planning for Mobile Robots in Populated Environments
Cognitive Systems 2008, Cognitive Systems Monographs, Springer, 2010
|
|

Arras K.O., Burgard W., Gross H.-M.. (eds.),
Selected papers from the 2007 European Conference on Mobile Robots (ECMR '07)
Robotics and Autonomous Systems, vol. 85, nr. 2, February 2010
pdf |
|

Arras K.O., Martinez-Mozos O. (eds.),
Special issue on People Detection and Tracking
International Journal of Social Robotics, vol. 2, nr. 1, March 2010
read online (SpringerLink) |
|
2009

Tipaldi G.D., Ramos F.,
Motion Clustering and Estimation with Conditional Random Fields
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS'09), San Louis, USA, 2009
|
|

Luber M., Tipaldi G.D., Arras K.O.,
Place-Dependent People Tracking
International Symposium on Robotics Research (ISRR'09), Lucerne, Switzerland, 2009
| |
|

Arras K.O., Martinez Mozos O. (eds.),
People Detection and Tracking
ICRA 2009 Workshop Proceedings, Kobe, Japan, 2009
| |
|

Luber M., Arras K.O., Plagemann C., Burgard W.,
Classifying Dynamic Objects: An Unsupervised Learning Approach
Autonomous Robots, Vol. 26, Nr. 2-3, 2009
|
|
Lau B., Arras K.O., Burgard W.,
Tracking Groups of People with a Multi-Model Hypothesis Tracker
IEEE International Conference on Robotics and Automation (ICRA'09), Kobe, Japan, 2009
| |
|
2008
Luber M., Arras K.O., Plagemann C., Burgard W.,
Classifying Dynamic Objects: An Unsupervised Learning Approach
Robotics: Science and Systems (RSS'08), Zurich, Switzerland, 2008
|
|
Arras K.O., Grzonka S., Luber M., Burgard W.,
Efficient People Tracking in Laser Range Data using a Multi-Hypothesis Leg-Tracker with Adaptive Occlusion Probabilities
IEEE International Conference on Robotics and Automation (ICRA'08), Pasadena, USA, 2008
|
|

Censi A. and Tipaldi G.D.,
Lazy Localization using the Frozen Time Smoother
IEEE International Conference on Robotics and Automation (ICRA'08), Pasadena, USA, 2008
|
|
|
Mü,ller J., Stachniss C., Arras K.O., Burgard W.,
Socially Inspired Motion Planning for Mobile Robots in Populated Environments
International Conference on Cognitive Systems (CogSys'08), Karlsruhe, Germany, 2008
|
|
2007

Tipaldi G.D., Grisetti G., Burgard W.,
Approximated Covariance Estimation in Graphical Approaches to SLAM
IEEE/RSJ Int. Conference on Intelligent Robots and Systems (IROS'07), San Diego, USA, 2007
|
|
Arras K.O., Martinez Mozos O., Burgard W.,
Using Boosted Features for the Detection of People in 2D Range Data
IEEE International Conference on Robotics and Automation (ICRA'07), Rome, Italy, 2007
|
|
Grisetti G., Tipaldi G.D., Stachniss C., Burgard W., Nardi D.,
Fast and Accurate SLAM with Rao-Blackwellized Particle Filters
Robotics and Autonomous Systems, Special Issue on Simultaneous Localization and Map Building, vol. 55, nr. 1, pp. 30-38, 2007
|
|

Tipaldi G.D., Farinelli A., Iocchi L., Nardi D.,
Heterogeneous Feature State Estimation with Rao-Blackwellized Particle Filters
IEEE International Conference on Robotics and Automation (ICRA'07), Rome, Italy, 2007
|
|

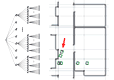
Iocchi L., Pellegrini S., Tipaldi G.D.,
Building multi-level planar maps integrating LRF, stereo vision and IMU sensors
IEEE International Workshop on Safety, Security and Rescue Robotics (SSRR'07), Rome, Italy, 2007
|
|
2006

Grisetti G., Tipaldi G.D., Stachniss C., Burgard W., Nardi D.,
Speeding Up Rao Blackwellized SLAM
IEEE International Conference on Robotics and Automation (ICRA'06), Orlando, USA, 2006
|
|
2005

Arras K.O., Cerqui D.,
Do we want to share our lives and bodies with robots? A 2000 people survey
Technical Report Nr. 0605-001, Autonomous Systems Lab, EPFL, June 2005
|
|
2004
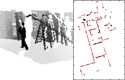
Wulf O., Arras K.O., Christensen H.I., Wagner B.,
2D Mapping of Cluttered Indoor Environments by Means of 3D Perception
IEEE International Conference on Robotics and Automation (ICRA'04), New Orleans, USA, 2004
|
|

Arras K.O.,
The CAS Robot Navigation Toolbox: Users Guide and Reference
Center for Autonomous Systems, KTH, September, 2004
|
|
2003

Arras K.O., Philippsen R., Tomatis N., de Battista M., Schilt M., Siegwart R.,
A Navigation Framework for Multiple Mobile Robots and its Application at the Expo.02 Exhibition
IEEE International Conference on Robotics and Automation (ICRA'03), Taipei, Taiwan, 2003
|
|

Arras K.O., Castellanos J.A., Schilt M., Siegwart R.,
Feature-Based Multi-Hypothesis Localization and Tracking Using Geometric Constraints
Robotics and Autonomous Systems, vol. 44, issue 1, pp. 41-53, 2003
|
|

Siegwart R., Arras K.O., Bouabdallah S., Burnier D., Froidevaux G., Greppin X., Jensen B., Lorotte A., Mayor L., Meisser M., Philippsen R., Piguet R., Ramel G., Terrien G., Tomatis N.,
Robox at Expo.02: A Large-Scale Installation of Personal Robots
Robotics and Autonomous Systems, vol. 42, issue 3-4, pp. 203-222, March 2003
|
|

Cerqui D., Arras K.O.,
Human Beings and Robots: Towards a Symbiosis? A 2000 People Survey
International Conference on Socio Political Informatics and Cybernetics (PISTA'03), Orlando, Florida, USA, 2003
|
|

Tomatis N., Terrien G., Piguet R., Burnier D., Bouabdallah S., Arras K.O., Siegwart R.,
Designing a Secure and Robust Mobile Interacting Robot for the Long Term
IEEE International Conference on Robotics and Automation (ICRA'03), Taipei, Taiwan, 2003
|
|
Martinelli A., Tapus A., Arras K.O., Siegwart R.,
Representations and Maps for Real World Navigation
11th International Symposium of Robotics Research (ISRR'03), Siena, Italy, 2003
|

Arras K.O., Tomatis N., Siegwart R.,
Robox, a Remarkable Mobile Robot for the Real World
Experimental Robotics VIII, Siciliano B. and Dario P. (eds.), Advanced Robotics Series (STAR), Springer Verlag, 2003
|
|
2002
Arras K.O., Castellanos J.A., Siegwart R.,
Feature-Based Multi-Hypothesis Localization and Tracking for Mobile Robots Using Geometric Constraints
IEEE International Conference on Robotics and Automation (ICRA'02), Washington DC, 2002
|
|

Arras K.O., Persson J., Tomatis N., Siegwart R.,
Real-Time Obstacle Avoidance For Polygonal Robots With A Reduced Dynamic Window
IEEE International Conference on Robotics and Automation (ICRA'02), Washington DC, 2002
|
|

Arras K.O., Burgard W. (eds.),
Robots in Exhibitions
IROS 2002 Workshop Proceedings, Lausanne, Switzerland, 2002
|
|
2001

Arras K.O., Tomatis N., Jensen B., Siegwart R.,
Multisensor On-the-Fly Localization: Precision and Reliability for Applications
Robotics and Autonomous Systems, vol. 34, issue 2-3, pp. 131-143, February 2001
|
|
Arras K.O., Castellanos J.A., Schilt M., Siegwart R.,
Towards Feature-Based Multi-Hypothesis Localization and Tracking
4th European Workshop on Advanced Mobile Robots (Eurobot'01), Lund, Sweden, 2001
|
|

Tomatis N., Nourbakhsh I., Arras K.O., Siegwart R.,
A Hybrid Approach for Robust and Precise Mobile Robot Navigation with Compact Environment Modeling
IEEE International Conference on Robotics and Automation (ICRA'01), Seoul, Korea, 2001
|
|

Caprari G., Arras K.O., Siegwart R.,
Robot Navigation in Centimeter Range Labyrinths
5th International Heinz Nixdorf Symposium, Autonomous Minirobots for Research and Edutainment (AMiRE'01), Paderborn, Germany, October 2001
|
|

Tomatis N., Brega R., Arras K.O., Jensen B., Moreau B., Persson J., Siegwart R.,
A Complex Mechatronic System: from Design to Application
IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM'01), Como, Italy, 2001
|
|
2000

Arras K.O., Tomatis N., Siegwart R.,
Multisensor On-the-Fly Localization Using Laser and Vision
IEEE/RSJ Int. Conference on Intelligent Robots and Systems (IROS'00), Takamatsu, Japan, 2000
|
|

Brega R., Tomatis N., Arras K.O.,
The Need for Autonomy and Real-Time in Mobile Robotics: A Case Study of XO/2 and Pygmalion
IEEE/RSJ Int. Conference on Intelligent Robots and Systems (IROS'00), Takamatsu, Japan, 2000
|
|

Caprari G., Arras K.O., Siegwart R.,
The Autonomous Miniature Robot Alice: From Prototypes to Applications
IEEE/RSJ Int. Conference on Intelligent Robots and Systems (IROS'00), Takamatsu, Japan, 2000
|
|

Moreau B., Tomatis N., Arras K.O.,
Multimodal Web Interface for Task Supervision and Specification
Proceedings of SPIE, vol. 4195, Mobile Robots XV and Telemanipulator and Telepresence Technologies VII, Boston, USA, 2000
|
|
1999
Wullschleger F.H., Arras K.O., Vestli S.J.,
A Flexible Exploration Framework for Map Building
3rd European Workshop on Advanced Mobile Robots (Eurobot'99), Zurich, Switzerland, 1999
|
|

Arras K.O., Tomatis N.,
Improving Robustness and Precision in Mobile Robot Localization by Using Laser Range Finding and Monocular Vision
3rd European Workshop on Advanced Mobile Robots (Eurobot'99), Zurich, Switzerland, 1999
|
|
1998

Arras K.O., Vestli S.J.,
Hybrid, high-precision localisation for the mail distributing mobile robot system MOPS
IEEE International Conference on Robotics and Automation (ICRA'98), Leuven, Belgium, 1998
|
|
Arras K.O.,
An Introduction to Error Propagation:
Derivation, Meaning and Examples of Cy = Fx Cx Fx'
Technical Report Nr. EPFL-ASL-TR-98-01 R3, Autonomous Systems Lab, EPFL, Sept. 1998
|
|
1997

Arras K.O., Siegwart R.,
Feature Extraction and Scene Interpretation for Map-Based Navigation and Map Building
Proceedings of SPIE, vol. 3210, Mobile Robotics XII, p. 42-53, Pittsburgh, USA, 1997
|
|
|
