
Faculty of Engineering > Department of Computer Science >
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Robots DARYL Meet Daryl, our new, custom-designed, interactive, 10-dof mobile robot platform. 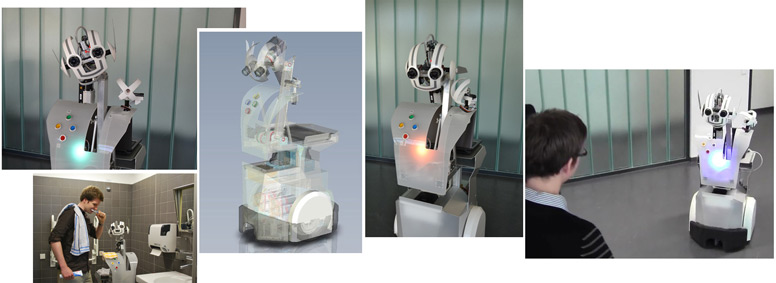
The robot has a 4 dof neck mechanism, a 2 dof expression modality, a 2 dof laser pointing device, a 2 dof differential drive, and the option to carry the new 5 dof Kuka YouBot arm for mobile manipulation. It accomodates two SICK laser scanner, 2 cameras, bumpers and wheel encoders, an industry standard embedded system with an RTOS and a C++ API, made for fully autonomous operation under real-world conditions. We realized the robot in collaboration with: Formfabrik, industrial design |